

Credit: SNSM Bandol
Sailors have always been haunted by falling into the sea. Even with a trained crew, the operation of recovering a crew water fallen is risky, Already with the engine, even more with the sail. During my training years in Glénans Sailing School, Each boarding was an opportunity to systematically practice this maneuver, under sail, striving to come "die" heave to windward of the unfortunate, fortunately materialized by a buoy moored in a bucket as drift anchor. But that was not the real problem. It was above all not to lose sight of the crew, because come back to its fall position "reckoning" was virtually mission impossible. And still today, with our sophisticated electronic means, It's not as easy as you might think…
Nowadays, with a plotter or a tablet provided with a GPS, we think we can easily go back to a man overboard with a MOB function (Man Over Board), but it's ignoring a paramount variable : Drift. (¹)
The drift
Leeway drift is defined as the motion induced by the current and the wind affecting the surface of a floating object. The components of the vertical stabilizer include speed and angle of travel, that represent the speed and direction of movement. In the case of the rescue operation of person at sea (MOB), the effects of drift can significantly alter the position of the MOB, especially in the event of a delay in the start of the operation.
The drift calculation can be divided into two different cases : Light wind and strong wind. In the first case, The wind force on the floating object is significantly weaker than that caused by the current and therefore the wind can be overlooked in the drift estimation. Accordingly, The drift path of the object is obtained by integrating the speed of the current. The inertia of the body for small masses, such as the person in the water, is often ignored because steady-state velocity is reached quickly. Alternatively, A strong wind causes a significant force on the surface of the object and this must be taken into account in the calculation of the drift. In case of strong winds, the drift will be composed of both the ocean current and relative velocity of the object compared to ambient water, according to its "wind grip".
1. The current
There are different methods for determining the speed of the current. On the one hand,, Ships are increasingly equipped with sensors that can directly measure the current. Then, local observations of the current could be used, but if the distance between the person and the ship is large, in this case the measurement of the current carried by the ship may not be enough accurate. Finally, Tidal atlases can provide information about the fields of current vectors, and more recently current predictions available in the form of GRIB files.

If the ship and the man overboard are subject to the same current, Identical speed and direction of drift, the increase in the MOB remains constant.
If the drift speed due to the current is assumed to be equivalent all around the ship, drift affects the ship and the MOB in the same way, which means that the relative motion between the objects will be the same. In other words, once the relationship between the current location of the vessel and that of the MOB has been determined, The effects of drift due to current can be excluded from the dynamics of the calculation if, and only if, The distance is not too great. Otherwise, A precise estimate of the current experienced by the two mobiles is essential.
2. The wind
Empirically determining the effects caused by the wind on an object is a difficult task. Instead, field experiments measuring the drift of different objects were preferred and have been studied excessively. Analysis of the data shows that the relationship between wind speed and drift is almost linear, which makes it possible to approximate the effects of the wind by linear regression. Thus, in this approach, wind-induced drift is calculated by the formula : (D = aW10 + b) in which a and b are constants and W10 is the wind speed measured at ten meters from the surface. Depending on the position of person in the water, the following table has been drawn up: :

A MOB in HELP seat position may be derived about 150 meters in 20 minutes by 20 knots wind.
Wind speed is not always measured by the ship's sensors (in example : motorboat), which makes it difficult to estimate the leeway drift. On the other hand, Ships are often equipped with sensors that can indirectly measure the speed of the current, which is obtained by subtracting vessel's velocity over ground from vessel's velocity related to the water. But the windward drift is not equivalent for the ship and for the MOB. Ship's windage, determined by its projected surface area, will result in a drift greater in speed than that of the MOB.
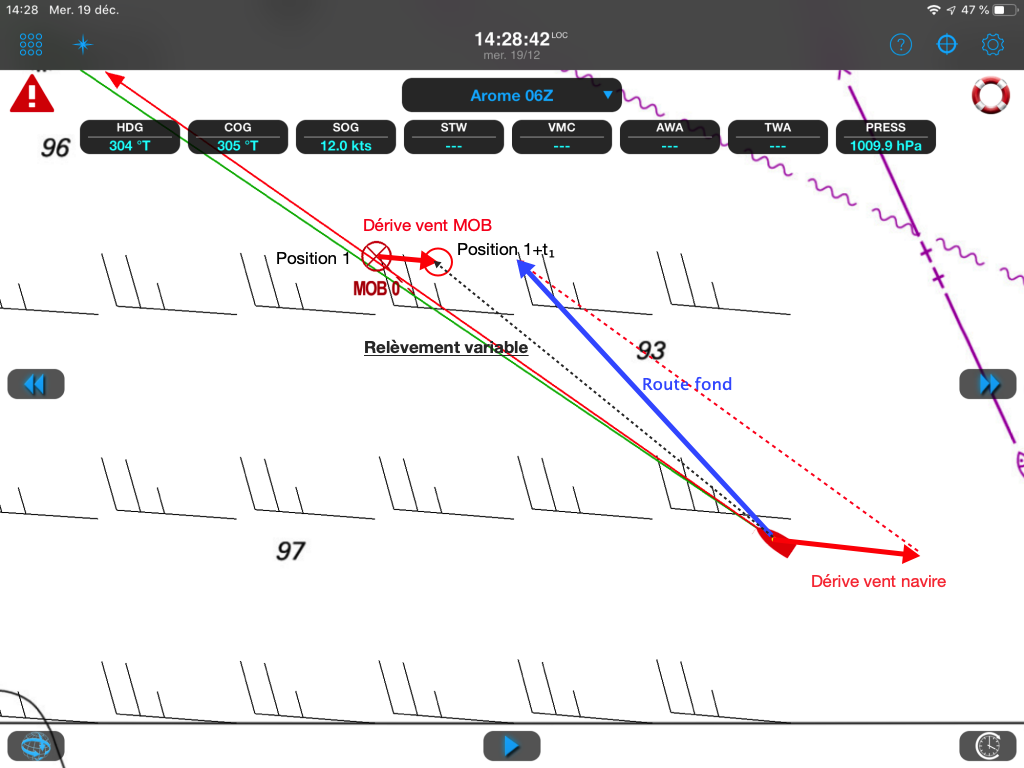
Ship's leeway drift is significantly higher than that of the man overboard
3. Locate the man overboard
Drift calculation is essential to determine the transition from the last known position to the current position of man overboard. A relevant estimate of the last known position of the person is the ship's GPS position at the time of the accident. To estimate drift displacement, the time between the beginning of the accident and the start of the rescue operation is multiplied by the drift velocity. It is therefore imperative to take into account these elements to hope going back "blindly", that is to say only with instruments, to the water fallen crew.
Weather4D and MOB function
Weather4D considers this theme with three settings allowing sophisticated calculation of the relative drift of the man overboard and the boat :

- Delay : adjustable from 0 to 60 seconds, allows to take into account the reaction time of the crew between the moment of the fall and the activation of the MOB function. The position of the fall will consider this delay, based on COGs (Road on the bottom) and SOG (speed over the bottom) instants.
- Current drift : Weather4D can calculate a man-overboard drift due to the current, in speed and direction. The data used must be those of an instrument allowing this calculation, for example, an electromagnetic speed sensor providing speed on two axes, longitudinal and lateral (²).
- Wind drift : Weather4D can calculate a man-overboard drift due to wind, in speed and direction. The data used must be those of an instrument allowing this calculation. An ultrasonic wind vane anemometer will provide the best accuracy in this case.
The calculation of these three settings takes into account, reaction time and drifts, allows to display on the map, just like for an AIS target, the respective locations of the boat and the MOB. The helmsman must strive to maintain a course merging these two locations (CPA = zero meters).

As for an AIS target, Calculation displays the prediction of the respective locations of the MOB and the boat at the time of CPA. The helmsman must maintain the two prediction points superimposed.
The limits of the MOB function
In heavy seas, with a strong downwind, in the worst case under spinnaker and maybe at night, even with a seasoned crew, The time it takes to implement a recovery maneuver may take several tens of minutes. lower spinnaker, Upwind in the breeze, Reduction of sail, starting engine, All these actions, even if they are carried out without panic, take time. The lost time will be more than double the return time to the man overboard. More distance increases, the harder it becomes to locate the target.
The help of electronics is undeniable in these circumstances, but it is still necessary to have the precise and perfectly calibrated instruments necessary for the calculation, a tracker or an application permanently connected to the instruments, and a good dose of luck. Depending on the water temperature, the physical constitution of the person, his clothing, if he is provided with or without a lifejacket, survival time is limited.

Estimated lifespan based on subject condition. May vary depending on body size and clothing
In the same way as routing, The MOB function is based on sophisticated calculations based on data that inherently have an element of randomness. So it's only aid, precious certainly, but not infallible.
The right solutions
We can't repeat it enough, the ultimate solution is to not fall into the sea ! Since the widespread use of self-inflating jackets, little bulky for maneuver, it is imperative to require the wearing, during the day when the sails are reduced, at night in all circumstances, and ensure that the harness tethers are hitched on robust lifelines. Unlawful to relieve themselves in pajamas rear balcony, at night under spinnaker !
Despite these precautions of common sense, we can now add to life jackets a personal AIS beacon that will even more accurately to locate a MOB. Most pleasure boats are equipped with an AIS receiver (and increasingly a transponder), the height of the VHF antenna allows a long-distance reception range, even with high wave heights. For example, the SIMY My-AIS automatic trigger announce a scope of 5 to 10 nautical miles and represent an excellent solution to optimize the recovery of the teammate to the water.
–––
(¹) The considerations of this article come directly from a academic thesis signed Atro Karvinen whose full version in English in PDF format can be downloaded from PDF format since This website.
(²) The sensor Airmar DX900+ provides the lateral movement speed, so leeway drift. Its data in two axes combined with the movement on the ground, calculation is available to deduce the speed and direction of the instantaneous current. This sensor is supported by Weather4D.
–––
Stupid question : In the hypothesis of current homogeneity in the area, You say that the current of calculation is dismissed… mais la position MOB enregistrée est une position sur le fond, pas sur l’eau. Comment écartez vous du calcul la valeur du courant dans ce cas ? Thanks in advance.
La formule fait référence au calcul dynamique du déplacement relatif des deux mobiles (MOB/bateau). Si vous avez un peu de temps entre la dinde et la bûche, téléchargez la thèse (lien dans les renvois) et prenez un peu d’aspirine 😉
Tout cela est bien théorique. And, si on parvient à revenir au point GPS et que malgré tout, on n’aperçoit pas le MOB, what ?
La prochaine étape est d’engager un processus de recherche. Ok, mais on cherche comment, what a journey, on n’a pas le temps de tourner en rond !
The OpenCPN SAR Module allows you to quickly define research patterns around the MOB point : square road, parallel route, Road by sectors, Staircase road ...
Will we see this functionality one day and W4D ?
Thank you Francis,
The worst situation is the fall at night while the crew sleeps. For that, You need a powerful sound alert on board, This is not necessarily the case with the AIS. Can you specify the necessary conditions for the trigger of the tag lesses this sound alert on board ?
Some transponders such as XB8000 Vesper Marine offer an external buzzer for AIS and the Anchor Watch. Digital Yacht AIS offers a small box AIS Life Guard compatible with all their receivers and transponders. There are certainly others.
Thank you Francis,
Good synthesis of man techniques at sea.
I lost a teammate in the sea under spinnaker. Method decided in 5 seconds: 1 teammate did not drop him with his eyes, 1 At the Drisse de Spi, the other to suffocate it and I engine thoroughly I arrived quickly on it.
It is impossible to do this if we are at 2 and that one falls into the water. Impossible if we haven't seen the teammate fall into the water, Impossible if we do not see it in the eye in the wake.
Electronic/computer tools are very useful in these cases, provided you have a team member dedicated to the use of these tools. A tag ais in the pocket is a "must have".