

Crédit: SNSM Bandol
De tous temps les marins ont eu la hantise de la chute à la mer. Même avec un équipage entraîné, la manœuvre de récupération d’un équipier tombé à l’eau est hasardeuse, déjà au moteur, mais encore plus à la voile. Au cours de mes années d’apprentissage aux Glénans, chaque embarquement était l’occasion de s’entrainer systématiquement à cette manœuvre, à la voile, en s’efforçant de venir « mourir » à la cape courante au vent de l’infortuné, fort heureusement matérialisé par une bouée amarrée à un seau faisant ancre flottante. Mais le vrai problème n’était pas là. Il fallait avant tout ne pas perdre l’équipier de vue, car revenir sur sa position de chute « à l’estime » était virtuellement une mission impossible. Et encore aujourd’hui, avec nos moyens électroniques sophistiqués, ce n’est pas aussi facile qu’on pourrait bien le croire…
De nos jours, avec un traceur ou une tablette munie d’un GPS, on croit pouvoir facilement revenir sur un homme à la mer grâce à une fonction MOB (Man Over Board), mais c’est sans tenir compte d’une variable primordiale : la dérive. (¹)
La dérive
La dérive est définie comme le mouvement induit par le courant et le vent affectant la surface d’un objet flottant. Les composantes de la dérive comprennent la vitesse et l’angle de déplacement, qui représentent la vitesse et la direction du mouvement. Dans le cas de la manœuvre de sauvetage de l’homme à la mer (MOB), les effets de la dérive peuvent altérer considérablement la position du MOB, surtout en cas de retard dans le démarrage de l’opération.
Le calcul de la dérive peut être divisé en deux cas différents : vent faible et vent fort. Dans le premier cas, la force du vent sur l’objet flottant est nettement plus faible que celle causée par le courant et le vent peut donc être négligé dans l’estimation de la dérive. En conséquence, la trajectoire de dérive de l’objet est obtenue en intégrant la vitesse du courant. L’inertie du corps pour les petites masses, telle que la personne dans l’eau, est souvent ignorée car la vitesse à l’état d’équilibre est atteinte rapidement. Au contraire, un vent fort provoque une force importante sur la surface de l’objet et ceci doit être pris en compte dans le calcul de la dérive. En cas de vent fort, la dérive sera composée du courant marin et de la vitesse relative de l’objet par rapport à l’eau ambiante, en fonction de sa « prise au vent ».
1. Le courant
Il existe différentes méthodes pour déterminer la vitesse du courant. D’une part, les navires sont de plus en plus souvent équipés de capteurs capables de mesurer directement le courant. Ensuite, les observations locales du courant pourraient être utilisées, mais si la distance entre la personne et le navire est importante, dans ce cas la mesure du courant effectuée par le navire risque de ne pas être suffisamment précise. Enfin, les atlas de marée peuvent fournir des informations sur les champs des vecteurs de courant, et plus récemment les prédictions de courants disponibles sous forme de fichiers GRIB.

Si le navire et l’homme à la mer subissent un même courant, vitesse et direction de dérive identiques, le relèvement du MOB reste constant.
Si la vitesse de dérive due au courant est supposée être équivalente tout autour du navire, la dérive affecte le navire et le MOB de la même manière, ce qui signifie que le mouvement relatif entre les objets sera le même. En d’autres termes, une fois que la relation entre l’emplacement actuel du navire et celui du MOB a été déterminée, les effets de la dérive due au courant peuvent être écartés de la dynamique du calcul si, et seulement si, la distance n’est pas trop importante. Dans le cas contraire, une estimation précise du courant subi par les deux mobiles est indispensable.
2. Le vent
Déterminer empiriquement les effets induits par le vent sur un objet est une tâche difficile. Au lieu de cela, des expériences sur le terrain mesurant la dérive de différents objets ont été préférées et effectuées en quantité. L’analyse des données montre que la relation entre la vitesse du vent et la dérive est presque linéaire, ce qui permet d’approximer les effets du vent par régression linéaire. Ainsi, dans cette approche, la dérive induite par le vent est calculée par la formule : (D = aW10 + b) dans laquelle a et b sont des constantes et W10 est la vitesse du vent mesurée à dix mètres de la surface. Selon la position dans l’eau de l’homme à la mer, on a ainsi établi le tableau suivant :

Un MOB en position assise de sécurité peut dériver de 150 mètres en 20 minutes par 20 noeuds de vent.
La vitesse du vent n’est pas toujours mesurée par les capteurs du navire (exemple : motonautisme), ce qui rend difficile l’estimation de la dérive au vent. Par contre, les navires sont souvent équipés de capteurs capables de mesurer indirectement la vitesse du courant, obtenue en soustrayant la vitesse du navire sur le fond de la vitesse du navire sur l’eau. Mais la dérive au vent n’est pas équivalente pour le navire et pour le MOB. La prise au vent du navire, déterminée par sa surface projetée, engendrera une dérive supérieure en vitesse à celle du MOB.
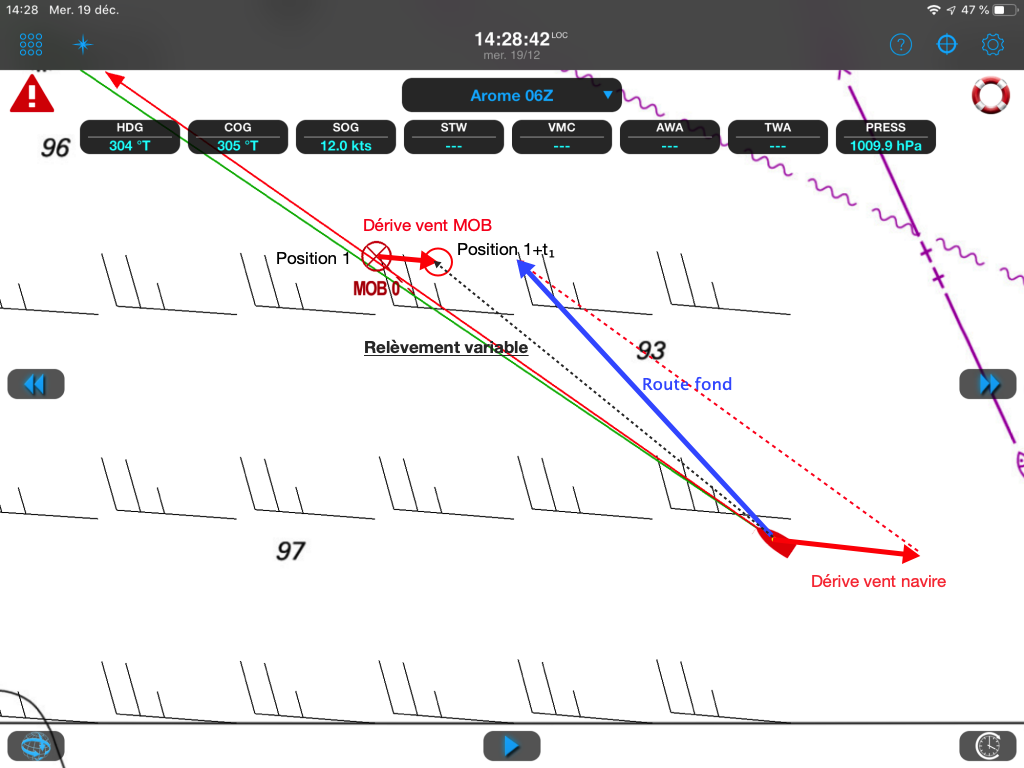
La dérive au vent du navire est nettement supérieure à celle de l’homme à la mer
3. Retrouver l’homme à la mer
Le calcul de la dérive est essentiel pour déterminer le passage de la dernière position connue à la position actuelle de l’homme à la mer. Une estimation pertinente de la dernière position connue de la personne est la position GPS du navire au moment de l’accident. Pour estimer le déplacement causé par la dérive, le temps écoulé entre le début de l’accident et le début de la manoeuvre de récupération est multiplié par la vitesse de dérive. Il est donc impératif de prendre en compte ces éléments pour espérer revenir «à l’aveugle », c’est-à-dire uniquement aux instruments, sur l’équipier tombé à l’eau.
Weather4D et la fonction MOB
Weather4D prend en compte cette thématique par trois réglages permettant un calcul sophistiqué de la dérive respective de l’homme à la mer et du bateau :

- Retard : réglable de 0 à 60 secondes, permet de tenir compte du délai de réaction de l’équipage entre l’instant de la chute et l’activation de la fonction MOB. La position de la chute tiendra compte de ce délai, en fonction des COG (route sur le fond) et SOG (vitesse sur le fond) instantanés.
- Dérive du courant : Weather4D peut calculer une dérive de l’homme à la mer due au courant, en vitesse et en direction. Les données utilisées doivent être celles d’un instrument permettant ce calcul, par exemple un capteur de vitesse électromagnétique fournissant la vitesse sur deux axes, longitudinal et latéral (²).
- Dérive du vent : Weather4D peut calculer une dérive de l’homme à la mer due au vent, en vitesse et en direction. Les données utilisées doivent être celles d’un instrument permettant ce calcul. Une girouette-anémomètre à ultrasons fournira la meilleure précision dans ce cas.
La prise en compte par le calcul de ces trois réglages, délai de réaction et dérives, permet d’afficher sur la carte, tout comme pour une cible AIS, les positions respectives du bateau et du MOB. Le barreur devra s’efforcer de maintenir un cap faisant se rejoindre ces deux positions (CPA = zéro mètre).

Comme pour une cible AIS, le calcul permet d’afficher la prédiction des positions respectives du MOB et du bateau à l’instant du CPA. Le barreur doit maintenir les deux points de prédiction superposés.
Les limites de la fonction MOB
Dans une mer formée, avec un vent fort de l’arrière, dans le pire des cas sous spinnaker et peut-être de nuit, même avec un équipage aguerri, le temps de mise en œuvre d’une manœuvre de récupération pourra prendre plusieurs dizaines de minutes. Affalage du spi, remontée au près dans la brise, réduction de voilure, démarrage du moteur, toutes ces actions, même effectuées sans panique, prennent du temps. Le temps perdu sera plus que doublé par le temps de retour sur l’homme à la mer. Plus la distance d’éloignement augmente, plus il devient difficile de retrouver la cible.
L’aide de l’électronique est indéniable dans ces circonstances, mais encore faut-il disposer des instruments précis et parfaitement calibrés nécessaires au calcul, d’un traceur ou d’une application connectée en permanence aux instruments, et d’une bonne dose de chance. Selon la température de l’eau, la constitution physique de la personne, son habillement, si il est équipé ou non d’un gilet de sauvetage, le temps de survie est limité.

Durée de vie estimée selon l’état du sujet. Peut varier selon la corpulence et les vêtements
De la même manière que le routage, la fonction MOB repose sur des calculs sophistiqués basés sur des données qui ont intrinsèquement une part d’aléa. Ce ne sont donc que des aides, précieuses certes, mais pas infaillibles.
Les bonnes solutions
On ne le répétera jamais assez, la solution absolue est de ne pas tomber à l’eau ! Depuis la généralisation des gilets à gonflage automatique, peu encombrants pour la manœuvre, il est impératif d’en imposer le port, de jour quand on réduit la voilure, de nuit en toutes circonstances, et veiller que les longes de harnais soient capelées sur des lignes de vie solides. Interdiction d’aller se soulager en pyjama au balcon arrière, de nuit et sous spi !
Malgré ces précautions de bon sens marin, on peut désormais ajouter au gilet une balise AIS personnelle qui permettra de manière encore plus précise de retrouver un MOB. La plupart des bateaux de plaisance étant équipés d’un récepteur AIS (et de plus en plus d’un E/R), la hauteur de l’antenne VHF permet une portée en réception à grande distance, même avec une hauteur de vagues importante. Par exemple les balises SIMY My-AIS à déclenchement automatique annoncent une portée de 5 à 10 milles nautiques et représentent une excellente solution pour optimiser la récupération de l’équipier à l’eau.
–––
(¹) Les considérations de cet article sont directement issues d’une thèse universitaire signée Atro Karvinen dont on peut télécharger la version intégrale en anglais au format PDF depuis ce site web.
(²) Le capteur Airmar DX900+ fournit la vitesse de déplacement latéral, donc la dérive sous le vent. Ses données sur deux axes combinées avec le déplacement sur le fond, le calcul permet d’en déduire la vitesse et la direction du courant instantané. Ce capteur est supporté par Weather4D.
–––
Question bête : Dans l’hypothèse d’homogénéité du courant dans la zone, vous dites qu’on écarte le courant du calcul… mais la position MOB enregistrée est une position sur le fond, pas sur l’eau. Comment écartez vous du calcul la valeur du courant dans ce cas ? Merci d’avance.
La formule fait référence au calcul dynamique du déplacement relatif des deux mobiles (MOB/bateau). Si vous avez un peu de temps entre la dinde et la bûche, téléchargez la thèse (lien dans les renvois) et prenez un peu d’aspirine 😉
Tout cela est bien théorique. Et, si on parvient à revenir au point GPS et que malgré tout, on n’aperçoit pas le MOB, on fait quoi ?
La prochaine étape est d’engager un processus de recherche. Ok, mais on cherche comment, quel parcours, on n’a pas le temps de tourner en rond !
Le module SAR d’OpenCpn permet de rapidement définir des patrons de recherche autour du point MOB : route carrée, route parallèle, route par secteurs, route en escalier…
Verra t’on cette fonctionnalité un jour and W4D ?
Merci Francis,
La pire situation est la chute de nuit pendant que l’équipage dort. Pour cela, il faut une alerte sonore puissante à bord, ce n’est pas forcément le cas avec l’AIS. Peux-tu préciser les conditions nécessaires pour que le déclenchement de la balise entraine cette alerte sonore à bord ?
Certains émetteurs/récepteurs comme le XB8000 de Vesper Marine proposent un buzzer externe pour l’AIS et l’Anchor Watch. Digital Yacht propose un petit boitier AIS Life Guard compatible avec tous ses récepteurs et transpondeurs. Il y en a certainement d’autres.
Merci Francis,
Bonne synthèse des techniques d’homme à la mer.
J’ai perdu un équipier à la mer sous spi. Méthode décidée en 5 secondes: 1 équipier ne le lâchait pas des yeux, 1 à la drisse de spi, l’autre à l’étouffer et moi moteur à fond je suis arrivé rapidement dessus.
Il est impossible de faire cela si on est à 2 et que l’un tombe à l’eau. Impossible si on a pas vu l’équipier tomber à l’eau, impossible si on ne le voit pas à l’oeil dans le sillage.
Les outils électroniques/informatiques sont très utiles dans ces cas, à condition d’avoir un équipier dédié à l’utilisation de ces outils. Une balise AIS dans la poche est un « must have ».